学习日记 | CSAPP-异常处理流-信号
Last updated on September 28, 2025 pm
在程序的世界里,信号如同命运的使者,SIGCHLD 像温柔的牵挂,当子进程走向终结,它便穿越异步的时空,触发那早已约定好的处理函数,就像无论世界如何喧嚣变化,总有一份执着的等待与守护,让每段进程的落幕都有专属的温柔回应。
首先要清楚,什么是信号?信号是一种更高层次的软件形式的异常,它允许进程和内核中断其他进程。
每种信号都对应于某种系统事件。信号大概可以分为两类:
- 对应底层的硬件异常,通常由内核异常处理程序处理,对用户进程不可见。
- 对应于内核或其他用户进程中较高层的软件事件。
信号术语
- 发送信号:内核通过更新目的进程上下文的某个状态,发送一个信号给目的进程
- 接收信号:进程可以忽略、终止或通过执行信号处理程序的用户层函数来捕获这个信号
- 待处理信号:待处理信号是指发出但没有被接收的信号。进程可以有选择地阻塞接收某种信号。当一种信号被阻塞,它仍可以发送,但是产生的待处理信号不会被接收。一个待处理信号最多只能被接收一次。内核为每个进程在 pending 位向量中维护着待处理信号的集合,在 blocked 位向量中维护着被阻塞的信号集合。
发送信号
Unix 系统提供了大量向进程发送信号的机制。这些机制都是基于进程组(process group)的概念。
进程组
每个进程都只属于一个进程组,进程组由一个正整数进程组ID来标识。
可以使用 getpgrp 函数获取当前进程的进程组 iD,可以使用 setpgid 函数改变自己或其他进程的进程组。
1 | |
/bin/kill程序发送信号
可以用kill程序向另外的进程发送任意的信号,正的PID表示发送到对应进程,负的PID表示发送到每个进程组的每个进程
用键盘发送信号
shell用作业这个抽象概念来表示为对一条命令行求值而创建的进程。任何时刻,至多只有一个前台作业,后台作业可以有多个。
shell 为每个作业创建一个独立的进程组,进程组 ID 通常取作业中父进程中的一个。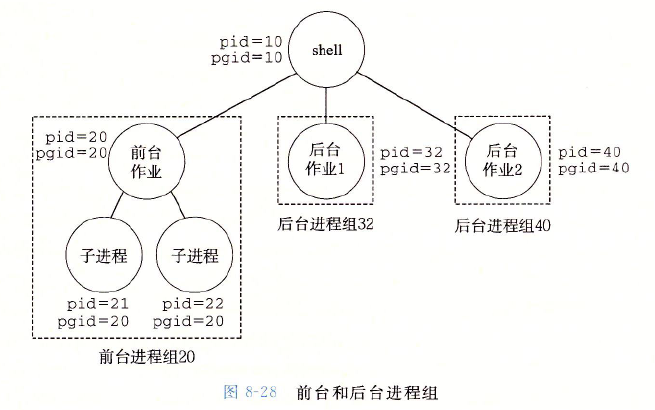
键盘上输入Ctrl+C 会导致内核发送一个SIGINT信号到从前台进程组中的每个进程,会终止前台作业
输入 Ctrl+Z 会发送一个SIGTSTP信号到前台进程组中的每个进程,会停止(挂起)前台作业
kill函数发送信号
进程可以通过调用kill函数发送信号给其他进程(包括自己)
1 | |
- pid>0,kill函数发送信号号码sig给进程pid
- pid=0,kill 函数发送信号 sig 给调用进程所在进程组中的每个进程
- pid<0,kill 函数发送信号 sig 给进程组 | pid | (pid 的绝对值)中的每个进程。
用alarm函数发送信号
进程可以通过调用alarm函数向自己发送SIGALRM信号
1 | |
alarm函数安排内核在secs秒后发送一个SIGALRM信号给调用进程。如果secs=0,则不会调度安排新的闹钟。
在任何情况下,对 alarm 的调用都将取消任何待处理的闹钟,并返回任何待处理的闹钟在被发送前还剩下的秒数。如果没有待处理的闹钟,就返回 0。
总结
- 内核给进程/进程组发送信号
- 使用bin/kill程序
- 调用kill函数
- 进程调用alarm函数给自己发送SIGALRM信号
- 键盘按键发送信号
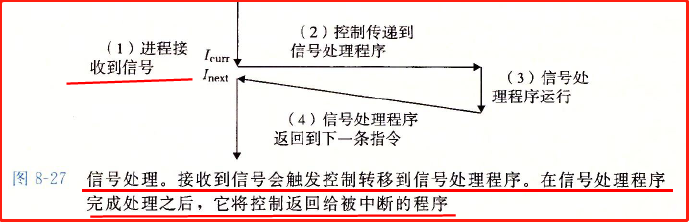
接收信号
内核把进程p从内核模式切换到用户模式时(从系统调用返回),会检查进程p的未被阻塞得待处理信号的集合。
如果集合为空,内核就将控制传递到 p 的逻辑控制流中的下一条指令;如果集合非空,内核就选择集合中的某个信号(通常是最小的 k),并强制 p 接收信号 k。
每个信号类型都有一个预定义得默认行为:
- 进程终止
- 进程终止并且转储内存
- 进程停止(被挂起)直到SIGCONT信号重启
- 进程忽略该信号
进程可以通过signal函数修改和信号相关联的默认行为,其中SIGSTOP和SIGKILL默认行为不能被修改
signal函数让程序捕捉到信号,并指定当收到特定信号时要执行的操作。signal函数接受两个参数:1
2
3#include<signal.h>
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum, sighandler_t handler); //若成功返回指向前次处理程序的指针,若出错则返回 SIG_ERR(不设置 errno)。 - signum,要处理的信号类型。如SIGINT,SIGTERM,SIGKILL,SUFAKRM
- handler,函数指针,指向要执行信号的处理函数
改变和signum关联的行为
- 如果 handler 是 SIG_IGN,那么忽略类型为 signum 的信号。SIG_IGN 是 signal.h 中定义的一个宏。
- 如果 handler 是 SIG_DFL,那么类型为 signum 的信号行为恢复为默认行为。SIG_DEF 是 signal.h 中定义的一个宏。
- 如果 hanlder 是用户定义的函数的地址,这个函数就被称为信号处理程序。只要进程接收到一个类型为 signum 的信号,就会调用这个程序。
信号处理程序中断
信号处理程序可以被其他信号处理程序中断
信号处理程序代码
1 | |
代码细节分析
这里的pause函数是暂停当前进程的执行,直到进程接收到一个信号。这里和signal函数配合使用,使得程序在pause处暂停执行,不会立刻结束而是等待信号的到来。
如果没有pause函数,程序会执行完signal函数后直接继续执行main函数下一条return 0语句结束。这样会导致程序在结束之前没有足够时间让信号发生并被处理。pause函数的存在阻塞了进程,让程序处于等待状态,以便能够接受并且处理SIGINT信号。
阻塞和解除阻塞信号
有两种阻塞信号的机制
- 隐式阻塞机制。内核默认阻塞任何当前处理程序正在处理信号类型的待处理信号。
- 显式阻塞机制。程序可以使用sigprocmask函数和辅助函数明确地阻塞和解除阻塞选定的信号。
sigprocmask函数
可以改变当前阻塞的信号集合(blocked位向量),具体和how值有关:
- SIG_BLOCK:把set中的信号增添到blocked中:
blocked=blocked|set - SIG_UNBLOCK:从blocked中删除set中的信号:
blocked=blocked&~set - SIG_SETMASK:
block=set
如果oldset非空,blocked位向量之前的值保存在oldset中
辅助函数
辅助函数用来对 set 信号集合进行操作:
- sigemptyset 初始化 set 为空集合;
- sigfillset 把每个信号都添加到 set 中;
- sigaddset 把信号 signum 添加到 set 中;
- sigdelset 把信号 signum 从 set 中删除。如果 signum 是 set 的成员返回 1,不是返回 0。
临时阻塞SIGINT信号的代码例
1 | |
编写信号处理程序
信号处理是Linux系统编程最棘手的问题,复杂属性在:
- 处理程序与主程序和其他信号处理程序并发运行,共享同样的全局变量,可能和主程序与其他处理程序互相干扰。
- 如何接收信号及何时接收信号的规则常常有违人的直觉。
- 不同的系统有不同的信号处理语义。
具体代码
1 | |
SIGCHLD/注意事项
要注意:如果存在一个未处理的信号 k,那表明至少有一个 k 信号到达了,实际上可能不止一个,以下是忽略了这一点的错误示例:
SIGCHLD:当子进程停止或终止的时候,会给父进程发送此信号,默认处理方式是忽略。
先来看代码:
1 | |
函数分析与理解
理解
- 信号处理程序不需要显式调用,当该进程收到了相关信息,会在自动调用信号处理程序。
- 信号处理程序与主程序共享同样的全局数据,所以应该是线程级并发?
错误分析
这里三个子进程,每个终止时都会给父进程发送SIGCHLD信号,父进程收到后就会调用一次信号处理程序,使用waitpid来回收僵尸进程。但是因为信号不会排队,如果在信号处理程序处理第一个僵尸子进程的时候,后两个子进程也终止了,那么第二个终止的子进程发给父进程的 SIGCHLD 信号会放到父进程的待处理信号集中,而第三个终止的子进程发送的 SIGCHLD 信号则会被丢弃。这样父进程就只能检测到两次SIGCHLD 信号,这样就只能回收两个子进程了。
问题修正
问题分析:问题在于信号不会排队,即父进程检测到一个 SIGCHLD 信号时,可能终止的子进程不止一个。
解决方式:修改信号处理程序,让它在回收子进程时不要只回收一个,而是一次性回收所有僵死的子进程。1
2
3
4
5
6
7
8
9
10
11
12void handler2(int sig)
{
int olderrno = errno;
while(waitpid(-1, NULL, 0) > 0){ //循环回收所有僵死子进程。
Sio_puts("Handler reaped child\n");
}
if(errno != ECHILD) //当循环结束时,waitpid 的返回值为 -1。如果是因为已经没有了子进程而返回 -1,这时 errno 就被设置为了 ECHILD,这是正确的结果。如果不是 ECHILD,则说明出错了。
Sio_error("waitpid error");
Sleep(1);
errno = olderrno;
}
waitpid函数
这里对这个函数理解还不够,插入来讲讲它。
作用是等待一个或多个子进程的状态改变,并获取其退出状态等信息。
pid_t waitpid(pid_t pid, int *status, int options);
这里的status是一个指向整数的指针,用于存储子进程的退出状态信息。通过WIFEXITED、WEXITSTATUS等宏可以从这个整数中提取出具体的退出状态信息。如果不关心子进程的退出状态,可以将status设置为NULL。
这里的options提供了一些额外的选项,常用的有WNOHANG,指定该选项后waitpid不会阻塞父进程,无论子进程是否结束,它都会立即返回。如果没有子进程退出,它会返回0;如果有子进程退出,它会返回子进程ID。
来看一段综合代码来理解理解:
1 | |
分析:父进程fork创建了一个子进程,用waitpid等子进程结束。在子进程中,它会休眠 5 秒后正常退出。父进程在waitpid返回后,通过WIFEXITED和WEXITSTATUS宏来判断子进程是否正常结束,并获取其退出状态码。
同步流以避免讨厌的并发错误
如何编写读写相同存储位置的并发流程序是一个难题。
解决方式:以某种方式同步并发流,从而得到最大的可行的交错集合,每个可行的交错都能得到正确的结果。
具有细微同步错误的shell程序
父进程在一个全局作业列表中记录着它的当前子进程,每个作业一个条目。当父进程创建一个子进程后,就把这个子进程添加到作业列表中。当父进程在 SIGCHLD 处理程序中回收一个僵死子进程时,它就从作业列表删除这个子进程。
1 | |
事件序列
- 父进程执行fork,内核调度创建的子进程运行
- 父进程运行前,子进程终止,变成一个僵尸进程,内核传递一个SIGCHLD信号给父进程
- 父进程变为可运行状态,正式执行之前,内核注意到有未处理的SIGCHLD,通过在父进程中运行信号处理程序来接受这个信号
- 信号处理程序回收终止的子进程,并调用 deletejob,但实际上 deletejob 函数什么也不会做,因为父进程还没有把这个子进程添加到作业列表中。
- 信号处理程序运行完毕后,内核运行父进程,父进程从 fork 返回,调用 addjob 函数错误地把这个已经终止并被回收掉的子进程添加到作业列表中。
在这个序列中,main和信号处理流之间的错误交错,让addjob前调用了deletejob。
经典同步错误:竞争
main 函数中调用 addjob 和信号处理程序中调用 deletejob 之间存在竞争,如果 addjob 赢得竞争,结果就是正确的,反之,结果就是错误的。
消除竞争
通过在调用fork前,阻塞SIGCHLD信号,在调用addjob后取消阻塞,保证了在子进程被添加到作业列表后才可能回收该子进程
注意:子进程会继承父进程的被阻塞集合,所以必须在调用 execve 之前,解除子进程中阻塞的 SIGCHLD 信号。
1 | |
显式地等待信号
主程序需要显式地等待某个信号处理程序运行。shell在创建一个前台作业的时候,接收到下一条命令之前,它必须等待作业终止,被SIGCHLD处理程序回收。
1 | |
避免while(!pid)等待过程浪费资源
- 在循环体内插入pause
while(!pid) pause();
//有问题,有严重的竞争条件:如果在 while 测试后和 pause 之前收到 SIGCHLD 信号,pause 会永远暂停。 - 在循环体内插入sleep
while(!pid) sleep(1);
//有问题,太慢了,每次循环检查后需要等很长时间才会再次检查循环条件。
正确解决
用sigsuspend函数
它等价于下面代码地原子版本,暂时用mask替换当前的阻塞集合,然后挂起该进程,直到收到一个信号使用sigsuspend函数来修改后的正确代码:1
2
3sigprocmask(SIG_SETMASK, &mask, &prev);
pause();
sigprocmask(SIG_SETMASK, &prev, NULL);1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21int main(int argc, char **argv)
{
sigset_t mask, prev;
Signal(SIGCHLD, sigchld_handler);
Signal(SIGINT, sigint_handler);
Sigemptyset(&mask);
Sigaddset(&mask, SIGCHLD);
while(1){
Sigprocmask(SIG_BLOCK, &mask, &prev); //阻塞 SIGCHLD 信号
if(Fork() == 0)
exit(0);
pid = 0;
while(!pid)
sigsuspend(&prev); //在 sigsuspend 中取消阻塞 SIGCHLD 信号并等待作业终止,等作业终止后恢复之前的阻塞集合。
Sigpromask(SIG_SETMASK, &prev, NULL); //取消阻塞 SIGCHLD 信号。
printf(".");
}
exit(0);
}
shell程序构成
一个极简的 shell 程序包括以下几个函数:main 函数、eval 函数、parseline 函数、buildin 函数,它们的各自的主要职责如下:
- main:shell 程序的入口点,职责:循环从标准输入读取命令行字符串并调用 eval 函数解析并执行命令行字符串。
- eval:解析并执行命令行字符串。职责:首先调用 parseline 函数解析命令行字符串,然后使用buildin 函数检查是否为内置命令,不是的话要生成一个进程(作业)来完成此命令,还要根据情况回收相应进程。
- parseline 函数:解析命令行字符串。职责:根据空格拆分命令行字符串,构造 argv 向量。
- buildin 函数:检查命令是否为内置命令,如果是的话直接调用相应函数,不是的话返回交给 eval 函数负责。
写在最后
感觉这是我写的最长的一篇学习blog了,这还只是csapp一门科目的一章内容的一部分,就要花这么这么多的时间和精力来学习记录。第8章异常控制流中还有8.1异常、8.2进程,8.3错误处理和8.4进程控制,这些都还不太熟悉。啊啊啊太难了。😢😢
任重而道远!🦾